





Radici artificiali e semi intelligenti. Le piante-robot di Barbara Mazzolai

Foto: Istituto Italiano di Tecnologia (IIT)
Plantoidi creati in laboratorio che muovono le loro radici artificiali per esplorare il mondo, analizzare il terreno e persino aiutarci a studiare le piante vere. La robotica può servire anche a comprendere i meccanismi della natura, la quale, a sua volta, può ispirare lo sviluppo di tecnologie innovative. Barbara Mazzolai, direttrice del Centro di micro-biorobotica dell’Istituto Italiano di Tecnologia si occupa di progettare dei robot ispirati al movimento delle piante e alle strategie di sopravvivenza che queste adottano per crescere e adattarsi all'ambiente attorno a loro. Alla dottoressa Mazzolai abbiamo chiesto allora di parlarci del suo lavoro e di come il mondo naturale, e in particolare quello vegetale, sia diventato una fonte di ispirazione per la costruzione di queste macchine intelligenti.
“La natura ispira l'essere umano fin da epoche remote”, ci racconta. “In un certo senso, Leonardo da Vinci potrebbe essere considerato il padre della bioispirazione. Rivolgere lo sguardo alla natura per fare innovazione è una strategia che appartiene non solo nella robotica, ma a tanti altri settori disciplinari. La robotica biosipirata rientra quindi nello scenario della biomimetica, dove la natura viene presa come fonte di ispirazione per risolvere dei problemi pratici e trovare risposte a delle esigenze concrete. Oltre alle piante, abbiamo studiato anche animali, soprattutto invertebrati, che ci offrono tantissime idee per la realizzazione di questi robot bioispirati che riproducono alcuni comportamenti e movimenti degli animali e delle piante”.
L'intervista completa a Barbara Mazzolai. Montaggio di Elisa Speronello. Immagini e insert video del Centro di micro-biorobotica dell’IIT
La caratteristica principale degli organismi vegetali che ispira la realizzazione di questi robot è la loro capacità di crescere per tutta la vita. Come spiega Mazzolai, “quella delle piante è una crescita indeterminata, alla quale è associato il movimento. La pianta cresce principalmente alle sue estremità, cioè nella parte terminale delle radici e in quella apicale, e lo fa aggiungendo cellule a partire anche da uno stimolo sensoriale. La sua, quindi, non è una crescita casuale, bensì guidata dalle informazioni che riceve dall'ambiente. A seconda dei bisogni della pianta, le sue radici si muovono nel terreno in cerca di acqua o nutrienti e la sua parte apicale, invece, si orienta verso la luce.
Le piante, quindi, ci insegnano a sviluppare dei robot con un corpo che cresce e si adatta all'ambiente circostante. E mentre si adatta, esplora. Il plantoide è in grado di andare alla ricerca di sostanze nel terreno e di muoversi tra gli anfratti dell'ambiente in cui si trova grazie a dei sensori nella punta delle sue radici. Il suo scopo principale, infatti, è quello di aiutare a studiare il suolo. Per questo, le radici delle piante sono il modello a cui ci ispiriamo, perché sono in grado di crescere muovendosi nel suolo, che è un ambiente estremo dove le pressioni e gli attriti sono già elevati dopo pochi centimetri di profondità. La loro è una strategia vincente perché consiste nello spingere solo la punta nel suolo, mentre tutto il resto non si muove. In questo modo c'è meno attrito e la pressione viene generata localmente. Per quanto i nostri robot non siano efficienti quanto una radice, il loro compito è lo stesso: si muovono crescendo ed esplorano il suolo”.
“Il robot è fatto proprio come se fosse una radice, ma le sue dimensioni sono più grandi”, continua Mazzolai. “Una parte responsabile della strategia di crescita della pianta è il meristema, che si trova subito dopo la punta della radice, dove avviene la divisione cellulare e dove l'assorbimento dell'acqua dall'esterno contribuisce alla spinta nel suolo.
La radice cresce aggiungendo cellule e il nostro robot imita questo meccanismo, aggiungendo alla sua struttura del materiale artificiale. Per fare questo, abbiamo miniaturizzato una stampante 3D. C'è un motore che tira un rocchetto di filo di materiale termoplastico, che cambia la sua viscosità quando viene scaldato e che entra nella “testa” del robot. Ci sono poi delle ruote dentate che fanno sì che il filo sia sempre a contatto con la punta. Ogni nuovo strato di filo viene quindi scaldato, diventa appiccicoso e si attacca allo strato precedente. In questo modo, il robot crea il suo corpo strato dopo strato”.
“La direzione di crescita della radice viene determinata grazie ai sensori di crescita che si trovano nella punta del robot”, continua Mazzolai. “Al momento abbiamo per esempio un sensore di gravità che permette al robot di capire in che direzione sta crescendo, e poi sensori di temperatura e umidità. Quest'ultimo è un paramento molto importante perché permette al robot di sapere se c'è dell'acqua nel terreno e capire dove si trovi. Ci sono poi anche sensori di tatto, che permettono alla radice di toccare l'ambiente in cui si trova e decidere come muoversi anche in base alla durezza del terreno o all'esistenza di eventuali aperture. Questi sensori, a ognuno dei quali è associato un comportamento, quindi servono proprio a implementare il comportamento del robot imitando le strategie delle pianta. Il nostro robot fa qualcosa di analogo a ciò che in biologia viene chiamato tropismo, ovvero la crescita anche in conseguenza a uno stimolo ambientale. Il plantoide, infatti, sceglie la direzione in cui muoversi sulla base delle informazioni che riceve dall'ambiente esterno”.
Il lavoro necessario per progettare e costruire queste macchine è molto complesso e richiede diverse conoscenze in varie materie di studio, come l'ingegneria informatica e dei materiali, la robotica, la biologia, la chimica e la fisica.
“L'interdisciplinarità è un aspetto fondamentale. Forse è il più importante di tutto il lavoro”, spiega Mazzolai. “Si parte dalla biologia. Una delle cose più difficili da fare, infatti, è selezionare le caratteristiche della pianta che vogliamo imitare. Per questo, ad esempio, per capire come fare in modo che il robot entri autonomamente nel suolo, bisogna studiare la strategia di crescita della radice.
Sono molte le caratteristiche della pianta che stiamo cercando di implementare nelle nostre macchine. Questa fase del lavoro richiede delle competenze in biologia o quantomeno un'affinità alla materia, perché occorre leggere dei testi specialistici e fare esprimenti sulla radice. Molti ragazzi con cui ho lavorato, tra cui anche ingegneri e informatici, si sono trovati a fare esperimenti con le piante, esplorando magari un ambito di ricerca in cui non avrebbero mai immaginato di ritrovarsi a lavorare dopo aver preso una laurea in quelle materie.
È poi molto importante che ci siano anche delle competenze in chimica, per realizzare dei motori che siano improntati sul principio osmotico, ed esperti dei materiali. Gli ingegneri hanno inoltre il compito di fabbricare il robot, gli informatici si occupano della parte relativa al comportamento, e partecipano al lavoro anche dei fisici.
Vengono quindi messe in campo tante competenze diverse e con il nostro lavoro vorremmo sempre di più dialogare anche con le scienze umanistiche, poiché questi robot bio-ispirati sono sempre più in grado di interagire con l'essere umano e sarebbe quindi bello studiare le percezioni di queste interazioni in campi diversi”.

Foto: Istituto Italiano di Tecnologia (IIT)
“Il mio interesse è sempre stato quello di realizzare macchine e robot che aiutino a studiare meglio l'ambiente in cui viviamo e l'impatto che abbiamo su di esso, andando ad esempio alla ricerca di sostanze inquinanti”, racconta Mazzolai. “In futuro, il nostro robot potrebbe anche essere utilizzato per le attività di bonifica. Abbiamo anche realizzato un prototipo di studio per un progetto con l'obiettivo di utilizzare il robot nei primi centimetri di profondità del suolo.
I plantoidi, quindi, sono stati pensati principalmente per supportare il lavoro di monitoraggio ambientale, ma le applicazioni della robotica bio-ispirata non finiscono qui. Simili macchine possono rivelarsi utili anche per indagare meglio le strategie di crescita delle piante vere e in futuro potrebbero essere usate per l'esplorazione in generale, persino quella spaziale, in archeologia e in medicina dal momento che, come sottolinea Mazzolai, questi robot che crescono dalla punta non danneggiano i tessuti mentre si muovono. “Noi realizziamo tecnologia abilitante che può essere impiegata in tanti contesti diversi. A volte è l'utilizzatore finale che ci propone delle applicazioni che noi inizialmente non avevamo nemmeno mai immaginato”, spiega.
Barbara Mazzolai è inoltre coordinatrice di un nuovo progetto internazionale chiamato I-Seed, che coinvolge anche la Scuola Superiore Sant’Anna e il CNR-IIA e ha ottenuto un finanziamento di 4 milioni di euro dall’Unione Europea. L'obiettivo è quello di realizzare dei robot biodegradabili, ispirati ai semi delle piante, che serviranno per il monitoraggio del suolo.
“Anche questo progetto parte dallo studio dei movimenti delle piante”, racconta Mazzolai. “In questo caso, però ci siamo concentrati su alcuni tipi di movimenti meno veloci, chiamati passivi o senza metabolismo, propri di quelle strutture che in realtà sono “morte”, ma continuano a muoversi, come ad esempio una pigna che sia apre e si chiude o un seme che penetra nel suolo. Questi movimenti sono associati all'organizzazione dei materiali nella parete della cellula della pianta.
Alcuni di questi materiali assorbono e rilasciano acqua, altri, come le miofibrille, guidano il movimento. Vogliamo allora tradurre queste organizzazioni dei materiali in dei robot che avranno più o meno la stessa forma delle strutture che stiamo studiando e saranno fatti di materiali biodegradabili. Avranno anche dei sensori che quando entrano in contato con il parametro da misurare, per esempio il livello di mercurio nel suolo o nell'aria, diventano fluorescenti. Questa fluorescenza viene poi misurata da una tecnologia di telerilevamento, chiamata LIDAR, trasportata con dei droni che faranno un pattugliamento e controlleranno le aree dove sono stati rilasciati i semi che si muovono, interagiscono con l'ambiente ed emettono la fluorescenza.
Queste non sono tecnologie sofisticate quanto quelle di laboratorio, e non saranno quindi sostitutive delle tecniche più tradizionali come il prelievo e l'analisi di campioni di suolo e di aria in laboratorio. Possono però essere affiancate a questi metodi di studio dell'ambiente e anche rivelarsi utili in zone remote o in paesi poveri, laddove non siano presenti strategie di monitoraggio”.
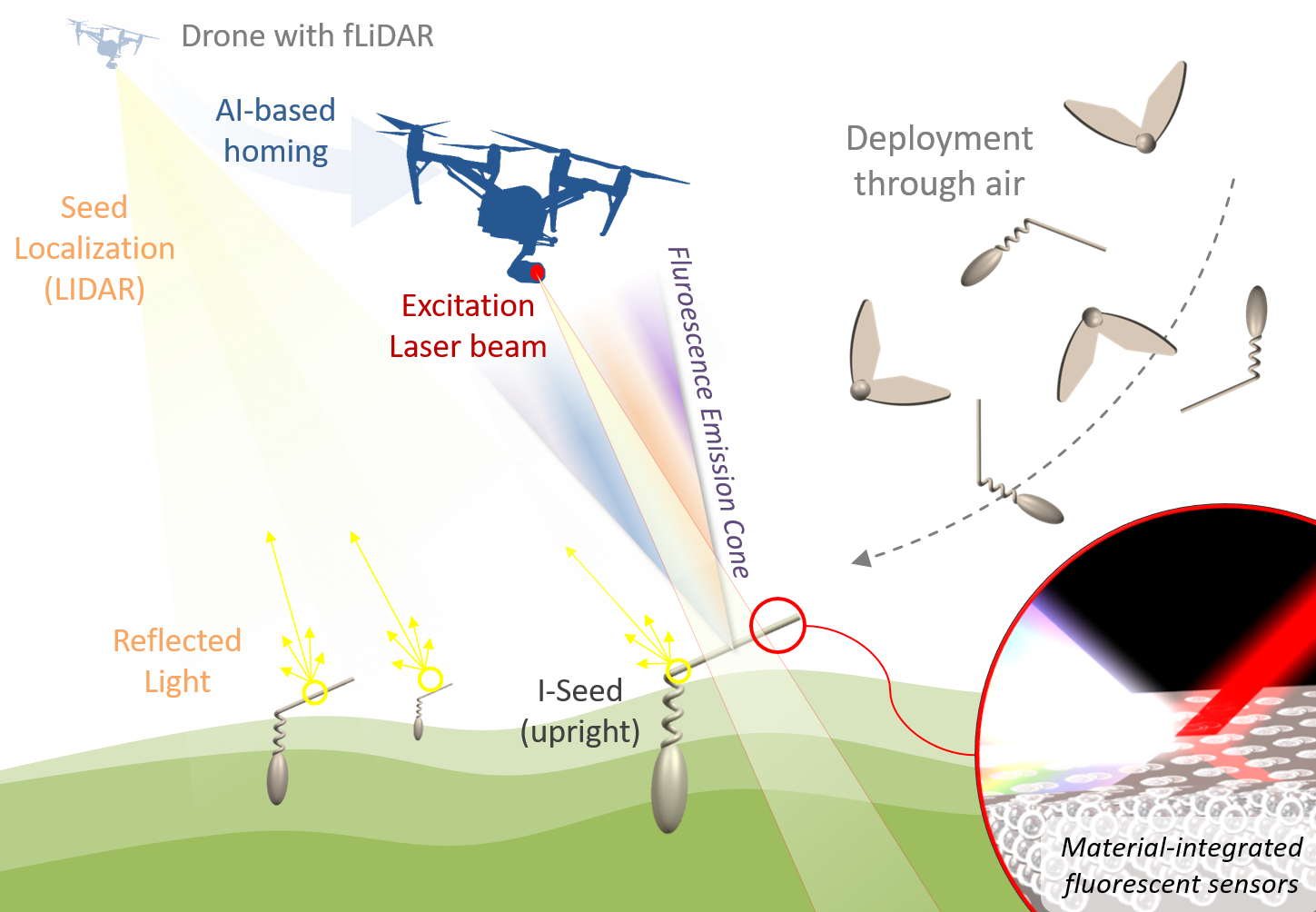
Il progetto I-Seed è ancora all'inizio delle sue fasi di sviluppo. Per il momento, la ricerca è focalizzata sulla scelta dei materiali. “Sono loro il cuore del progetto”, commenta Mazzolai. “Dovranno essere biodegradabili e avere una struttura che permetta loro di essere trasportati e diffusi con dei droni. Si tratta di un progetto molto ambizioso che mira a realizzare una tecnologia che permetta di rispettare e studiare meglio l'ambiente in cui viviamo. Se funzionerà, potrà dare un aiuto significativo all'agricoltura di precisione, perché permetterà di conoscere meglio la composizione del suolo, dell'aria e così via, e anche ai decisori politici, che avranno degli strumenti in più per svolgere meglio il proprio lavoro”.


